
◆はじめに
こんにちは、モブドラッコンです。
前回、キャラスタジオで巨大ロボを作る大まかな流れについて解説しましたが、今回からはより細かいテクニックについて解説していきたいと思います。
まずはロボ作りと切っても切り離せない、よく動く関節の作り方です。
◆なぜ関節にこだわった方がいいのか
さて、この記事のタイトルを見てこう思った方もいらっしゃるのではないでしょうか。
「関節なんてパーツとパーツをただ繋いで動くようにすればいいのでは?」
確かに、極端に言ってしまえば関節作りとはそれだけの作業です。
しかし、スタジオ製ロボは原則としてパーツを収めた無数のフォルダの集合体であり、キャラクリ製ロボに自由度で勝る代わりに、叩き台になる骨格がありません。
よって、どのように動かすのかは全て自分で考えなければなりません。
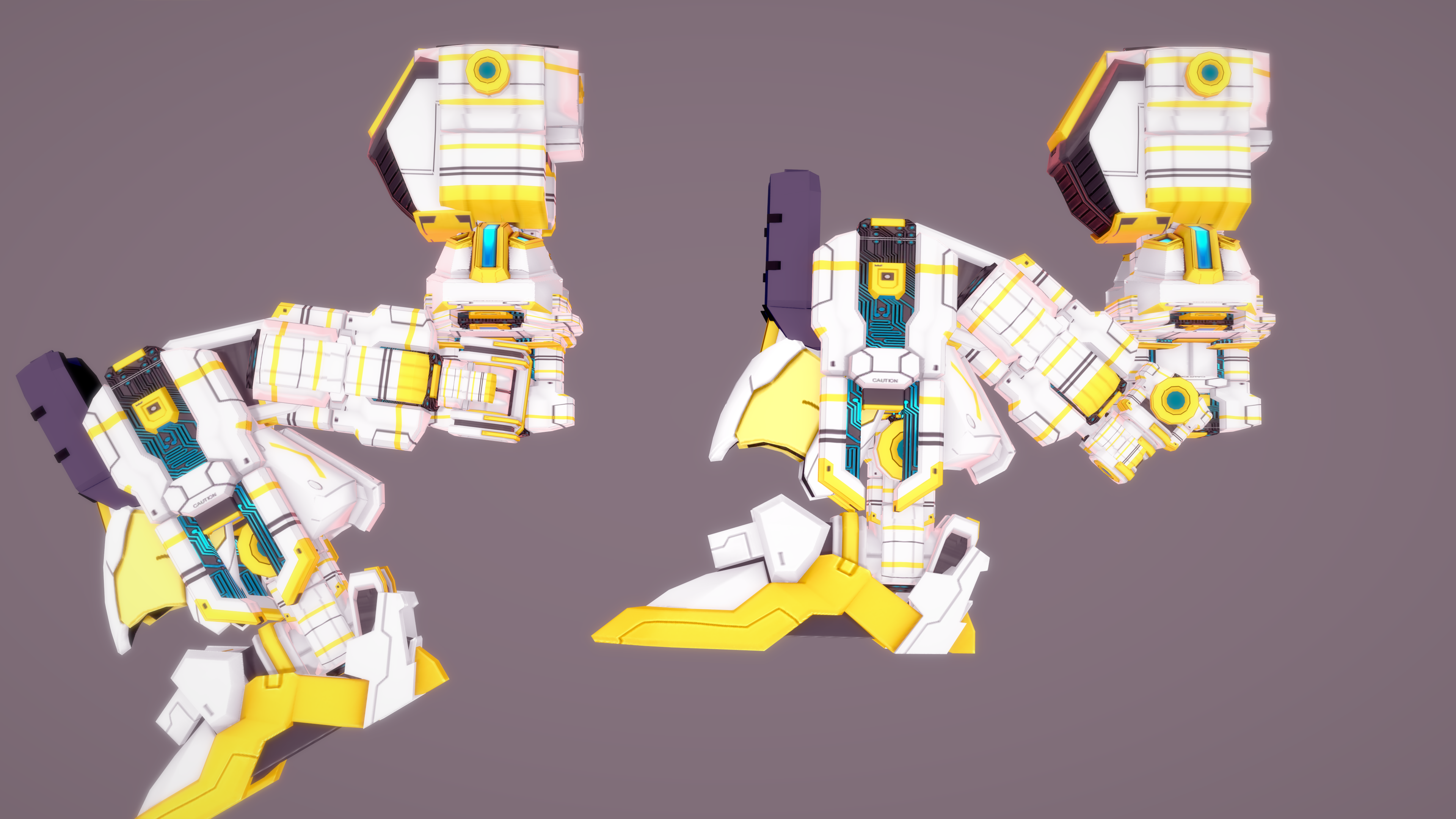
どのような関節を作るかによって、どれだけ見栄えの良いポージング、どれだけカッコいい撮影が出来るかが全て決まります。
より効率的に動かせる関節構造を構築することで、立ち姿がかっこいいだけでなく、よりポージング自由度が高くSS映えするロボを作ることが出来ます。
◆ポイント1 「四肢の付け根は3軸関節で」
関節作りにおいて、もっとも重要となるのはやはり腕と脚の付け根です。
この部位の可動域の広さが、ポージング自由度を決める最大の鍵と言っても過言ではないでしょう。
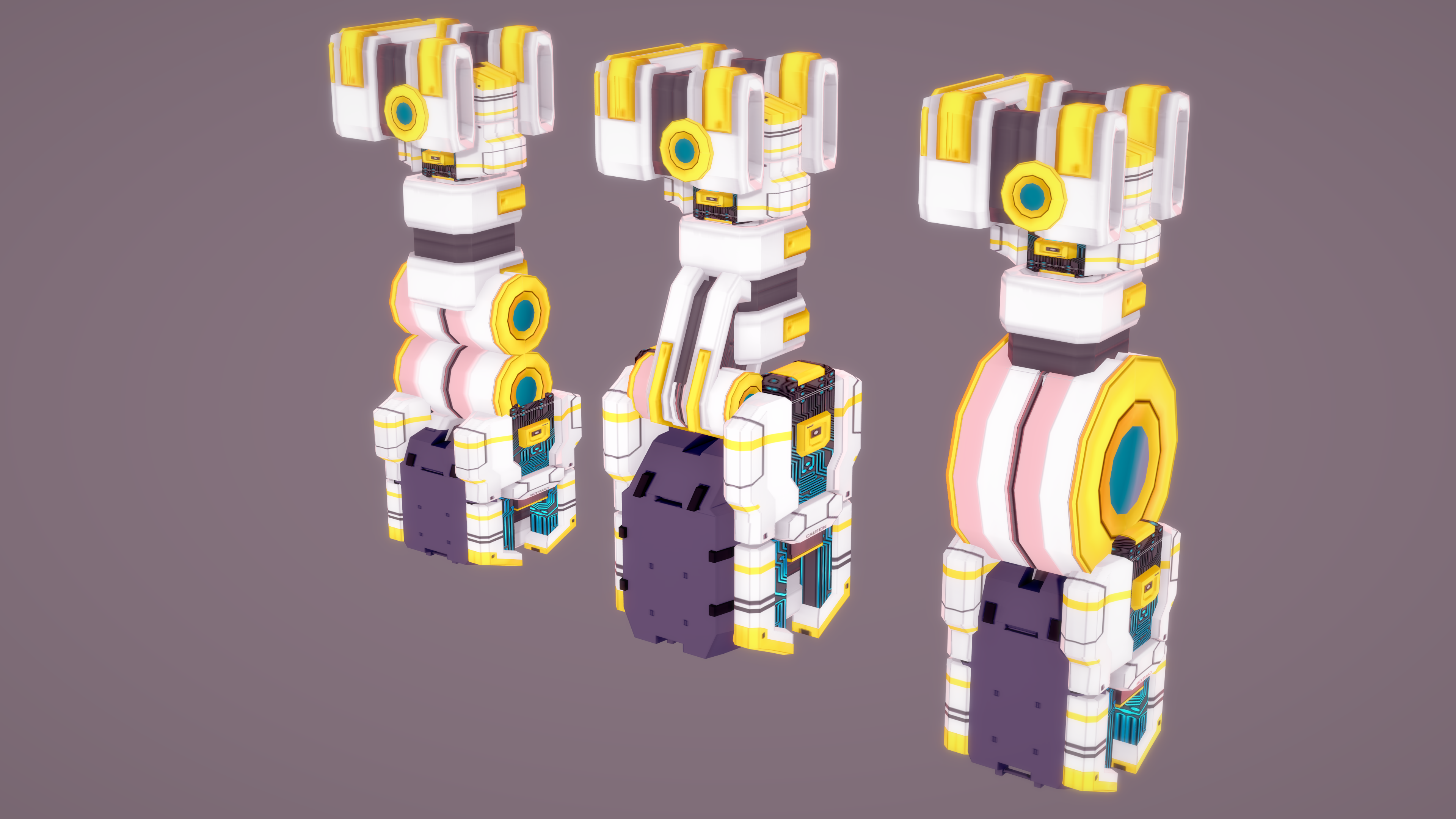
そこで活躍するのが、3軸構成の関節です。
構造自体は至って単純。
X軸で動かす前後スイング関節、Z軸で動かす左右スイング関節、Y軸で動かすロール関節と、各方向専用の可動軸を用意し、この3軸の可動を組み合わせることで様々な方向に動かせるようにするのです。

恐らく、これを聞いて「関節1つだけの方が楽じゃないの?」と思った方もいらっしゃるかもしれません。
確かに、ただ作って動かすだけならその方が圧倒的に楽です。
ではなぜこんな面倒なことをするのか?
答えは3つあります。
1つ目は、パーツの干渉を防ぐため。
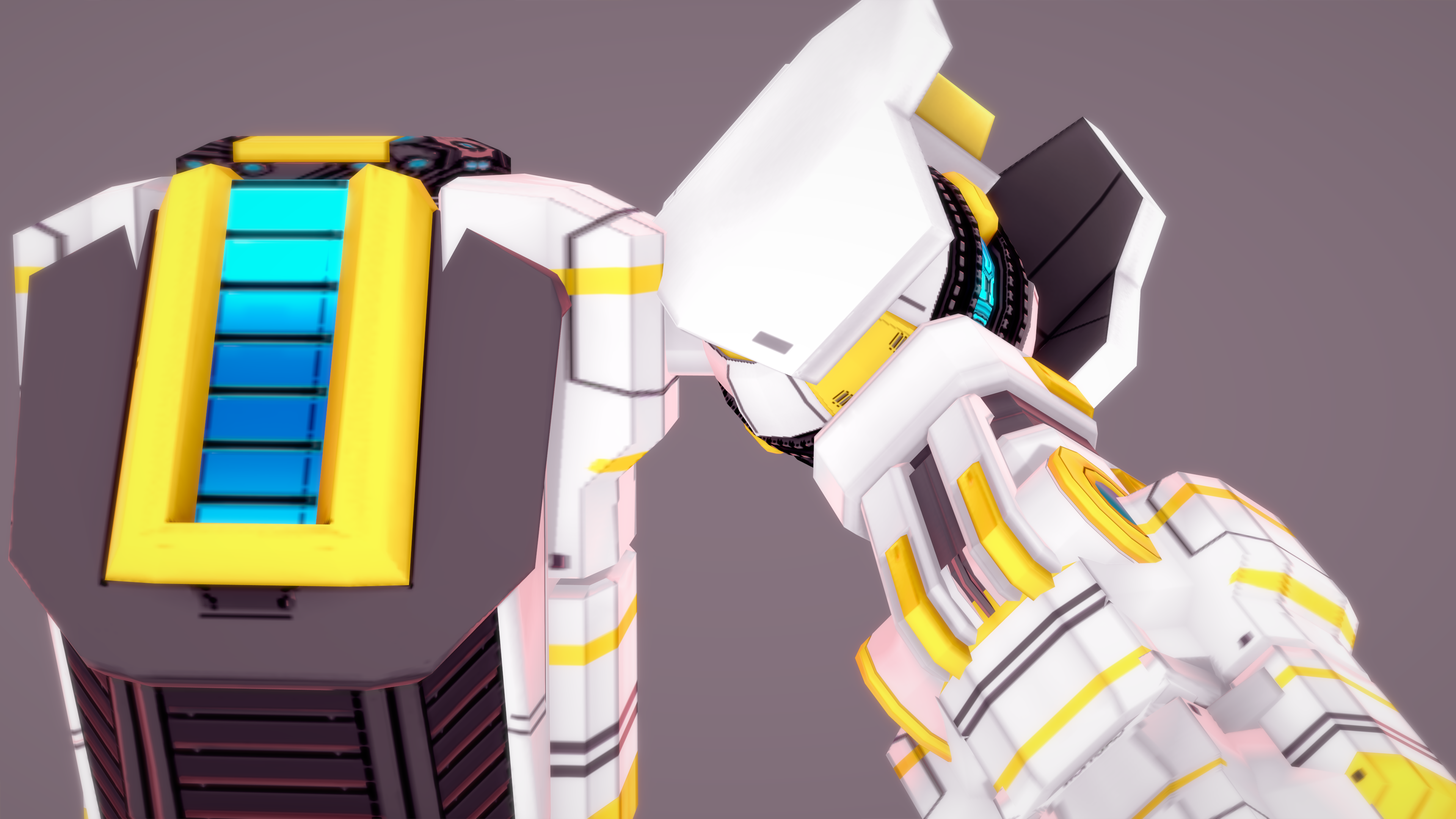
例えば、図のようにXYZ3軸すべての可動をメカボール1つだけでまかない、上にアーマーを被せるとします。
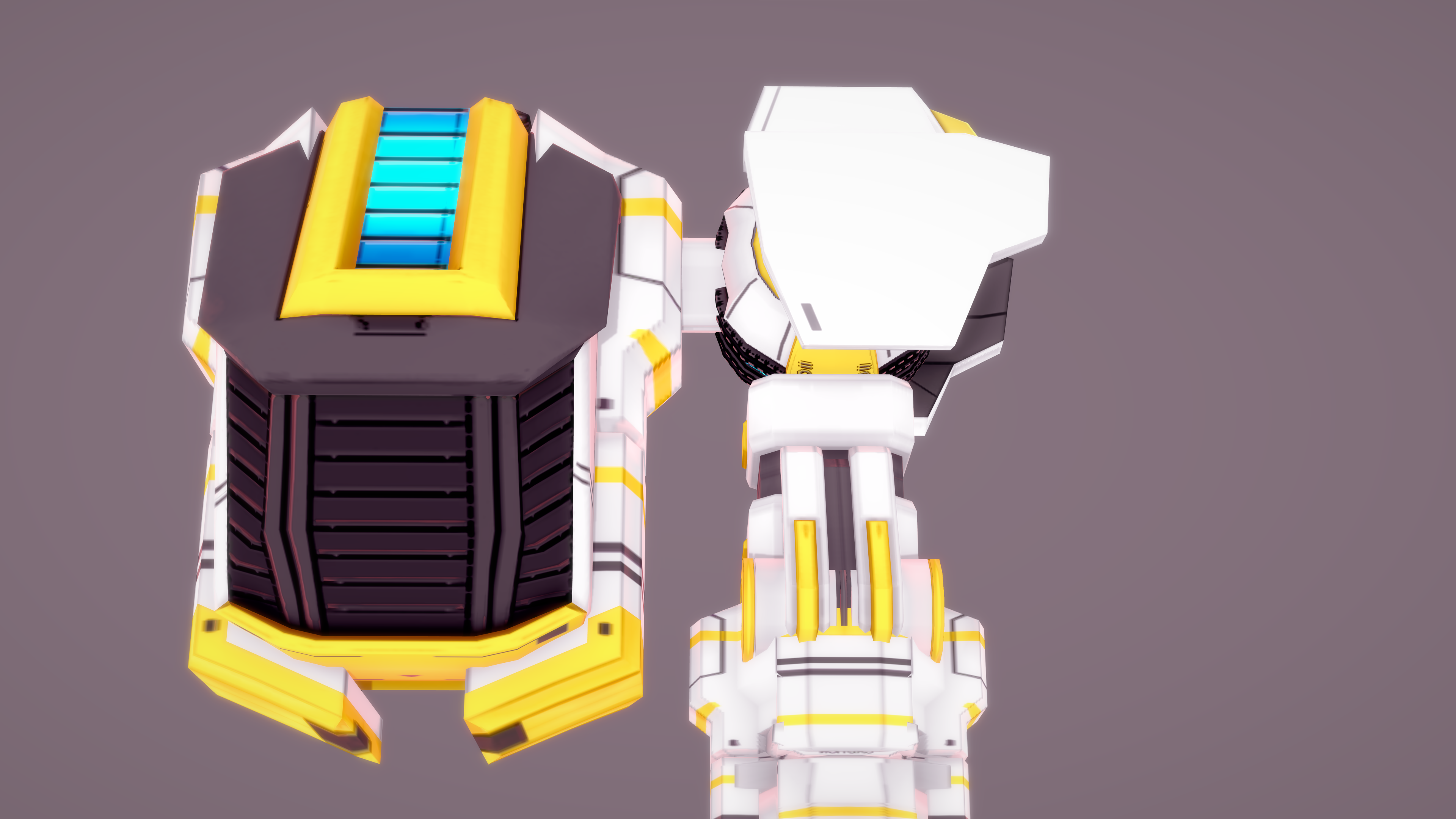
前後スイングと左右スイングだけならこれでもいいのですが、ここで腕を捻ってみましょう。

はい、もう分かりましたね。
様々な方向に複雑に曲がる部位は、1つだけの関節で処理しようとするとパーツの干渉が発生しやすくなり、これを避けるためにデザインが大幅に制限されてしまいます。
肩アーマーを専用のフォルダに入れ、独立した可動部位にするのもひとつの手ですが、そうなると腕を少し動かすだけでアーマーを毎回調整しないといけません。はっきり言って超面倒です。
その点、3軸構成の関節であれば、前後スイング関節に肩アーマーを入れてしまうことで、左右スイングとロールを加えても肩アーマーが動くことはありません。

2つ目は、可動範囲の拡大。
3軸方向の関節を完全に重ねるのではなく、少しずらして配置することで、アーマーや胴体との干渉を避けて可動範囲を大幅に広げられるのです。
これについては、股関節の項でもう少し詳細に解説させて頂きます。
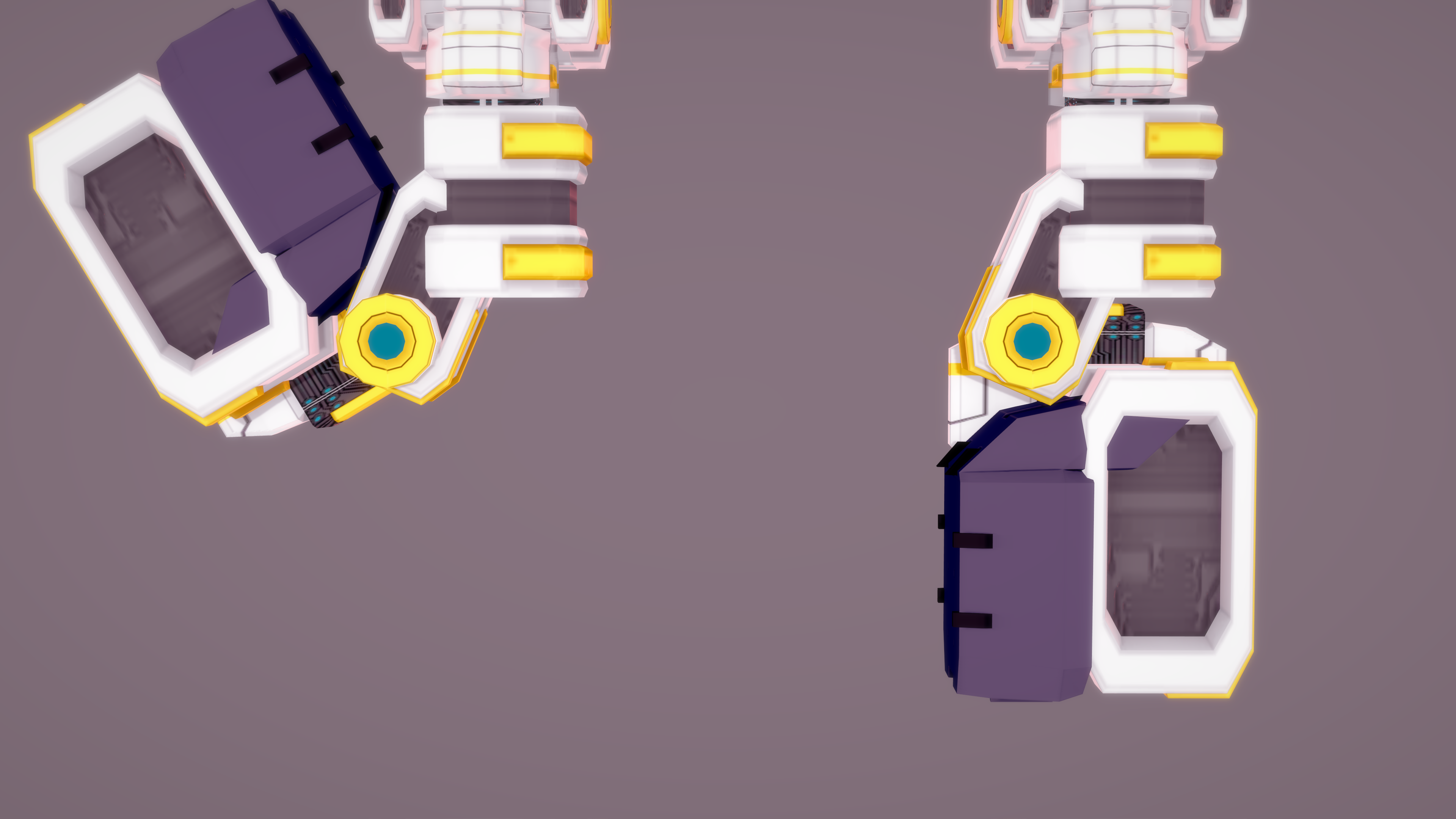
3つ目は、数値直打ちによる調整が楽になること。
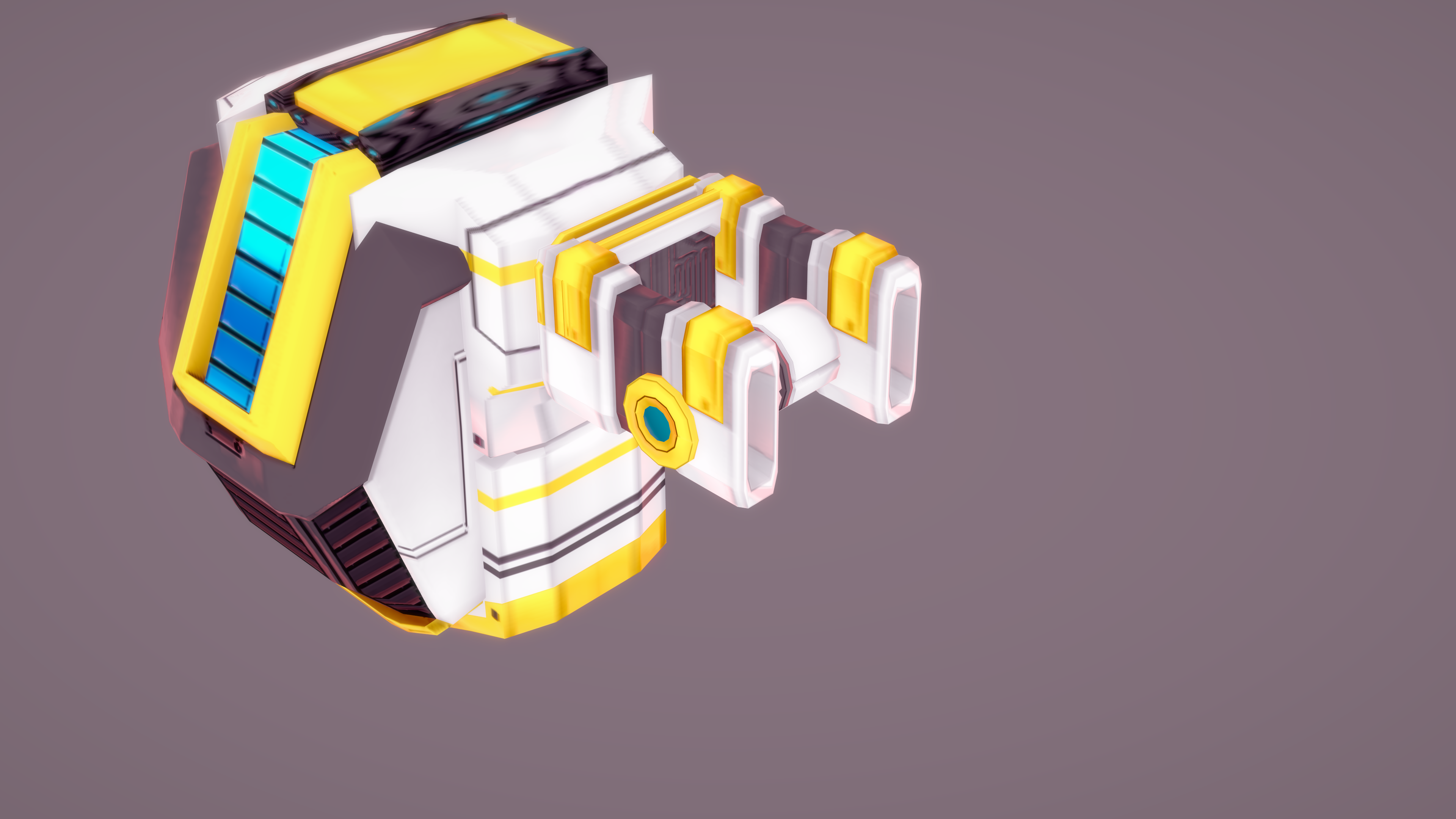
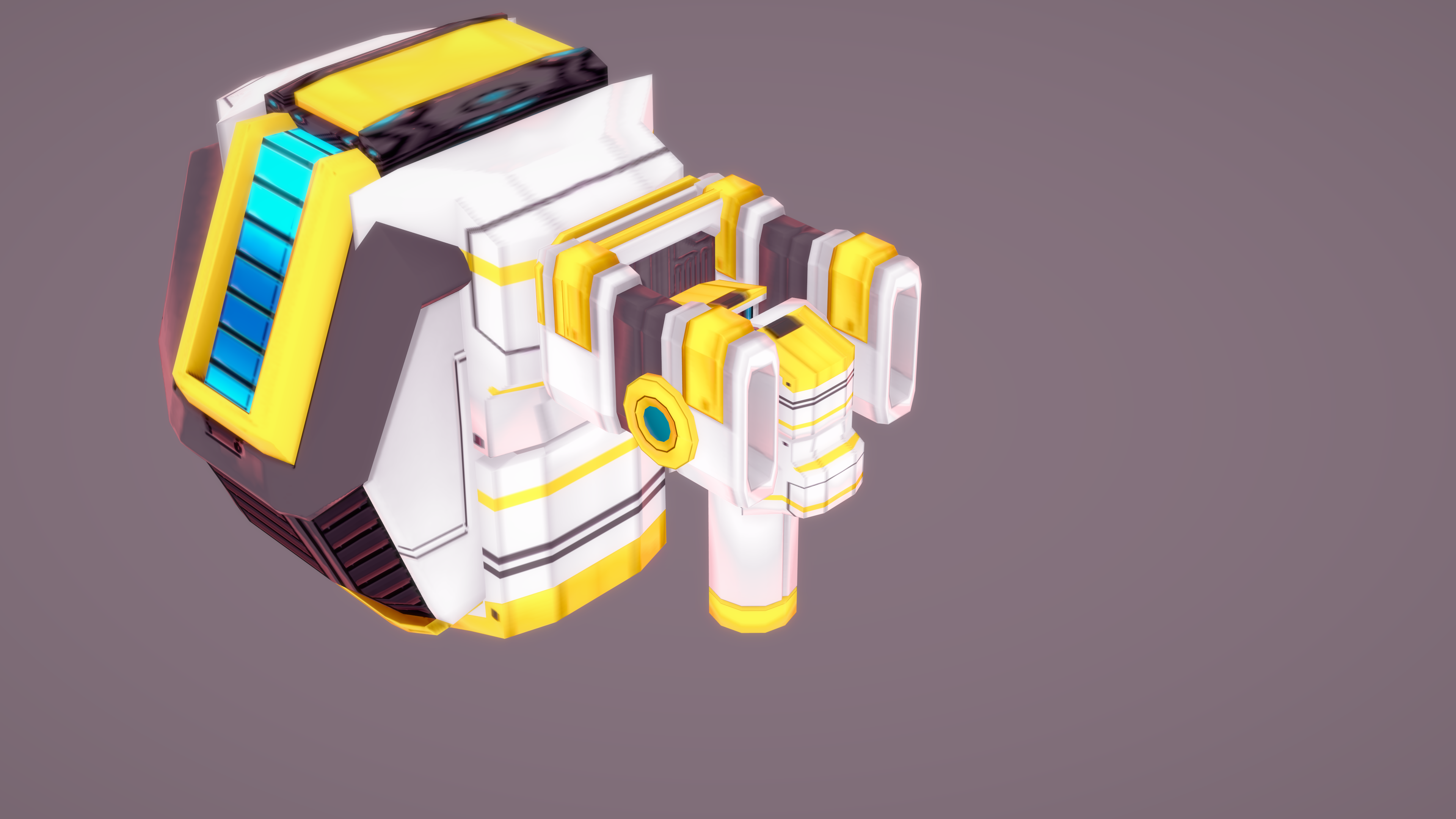
先ほどのメカボール関節をこのように動かし、角度の数値を見てみましょう。

3方向全ての数値がコンマ単位で複雑に変化していることが分かります。
普通に動かすだけならこれでもいいのですが、微妙な角度調整が必要なポーズ(例えば武器の両手持ちなど)では、ドラッグ操作よりも数値直打ちで調整した方が細かい操作が出来ます。
そうなると、3方向の動き全てをコンマ単位で計算して数値を打ち込むのは果てしなく面倒です。
そこで活躍するのが、各方向専用の可動軸。
前後スイング関節はX軸だけ、左右スイング関節はZ軸だけ、ロール関節はY軸だけ調節すればいいため、直打ちによる調節は簡単です。
ついでに、直立姿勢などの左右対称のポーズの時も、片方の関節の角度に応じてもう片方を直打ちした方が楽に設定出来るので、この場合も3軸方式が活躍します。
四肢の付け根の他にも、首、足首、可動式スラスターなど、複数方向に複雑に屈曲する部位は、基本的に各方向ごとの専用関節を用意して重ねる方式が望ましいでしょう。
以下に、3軸構成による肩関節と股関節の作り方を簡単に解説します。
■肩関節
●ステップ1 前後スイング関節
まず、胴体との接続軸の先にコの字型のフレームを設けます。
図ではメカボックスを使っていますが、ここは正直なんでもいいです。どうせ外からはあまり見えない部位なので、基本図形のキューブでも支障はないでしょう。
左右スイング関節をぶら下げるための接続軸をフレームの間に設置したら、前後スイング関節は完成です。
●ステップ2 左右スイング関節
肩フレームからぶら下げる腕の基部にあたる部位です。
3つの関節の中で一番外から見えにくい部位なので、ここも材料はなんでもいいです。
基部パーツと、ロール関節の接続軸の2つだけで成立します。
●ステップ3 ロール関節
有り体に言えば二の腕です。
要は肩と肘を繋ぐ役割さえ果たせればそれでいいので、パーツ数は少なくても大丈夫です。
可動範囲を追求すると肘関節の接合部には手間をかける必要がありますが、二の腕そのものは最悪メカボックス1個でも全く問題はありません。
これで肩関節は完成です。
■股関節
●ステップ1 腰フレーム
まず、上半身を乗せるT字型のフレームを作ります。

●ステップ2 脚の付け根
基本的な構造は肩関節と同じく、前後スイング関節、左右スイング関節、ロール関節の3軸構成です。
ただし、1点だけ肩と違うポイントとして、前後スイング関節を前方下にオフセット配置し、左右スイング関節は後方の片側支持とすることが挙げられます。

試しに、肩関節と同じく前後スイング関節を正中線、左右スイング関節を両側支持で配置した股関節も用意して、足を前に上げてみましょう。
比べてみれば差は歴然。
オフセット配置の方が胴体との干渉が減り、足を前に大きく蹴り上げられるのが分かるかと思います。
恐らく、これを見てこう思った方もいるでしょう。
「前には大きく蹴り上げられるけど、後ろに上がる範囲が狭くなるじゃん」
そんな方は、一度その場で立ち上がり、上体は動かさずに脚を真後ろに上げてみてください。
そう、人間の脚はそもそも後ろに大きく蹴り上げられるようには出来ていません。
デザインにもよりますが、人型ロボのポージングは基本的に人間のそれに準拠したものになります。
つまり、人体に不可能な可動は、出来なくても大して問題はないのです。
たまに後ろへの蹴り上げが必要になる時も、前傾姿勢を取らせれば大体解決します。
必要な可動だからこそ広い範囲が求められるのであって、ポージングに不要な可動は追求しなくてもよいのです。
ただし、以前の記事にも書いた通り、これはあくまで私流。
もしもあなたが極限の可動範囲を追い求めるのであれば、それに相応しい関節構造を探求するのは立派な道です。
◆ポイント2 「肘、膝の可動域確保」
■肘、膝関節の方式いろいろ
肘と膝の可動域拡大法はほぼ同じなので、ここでは肘関節を使って紹介していきたいと思います。
まず、メカボックスで出来た前腕と二の腕をメカポールで繋いだ単純な構造の腕を用意して、曲げてみましょう。
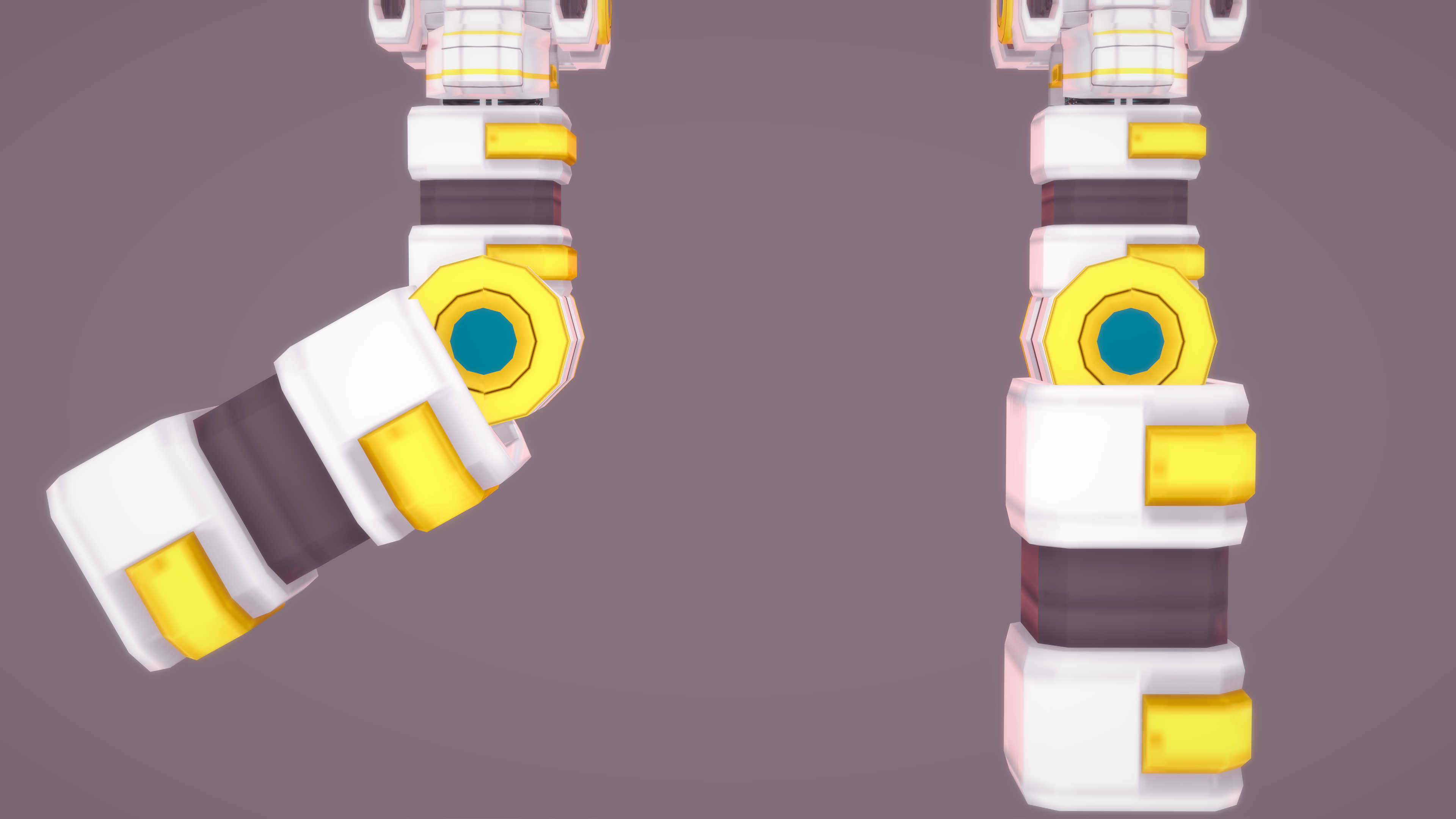
これはどうしたことでしょう。90度も曲がらないうちにメカボックス同士が干渉してしまいました。
原因は簡単。前腕と二の腕が直列で配置されてしまっているからです。
この状態だと、動かせば動かすほど前腕と二の腕が干渉し、180度曲げると完全に重なってしまいます。
よって、肘関節の可動域拡大とは、上腕と二の腕の干渉を回避するということに他なりません。
効率的に動かせる肘関節の構造は1つだけではなく、いくつか方式が挙げられます。
ここでは、私が過去に使ったことのある3つの方式をご紹介したいと思います。
どれもメカポールを横向きに配置している部位が可動軸なので、ここに注目してください。
●二重関節
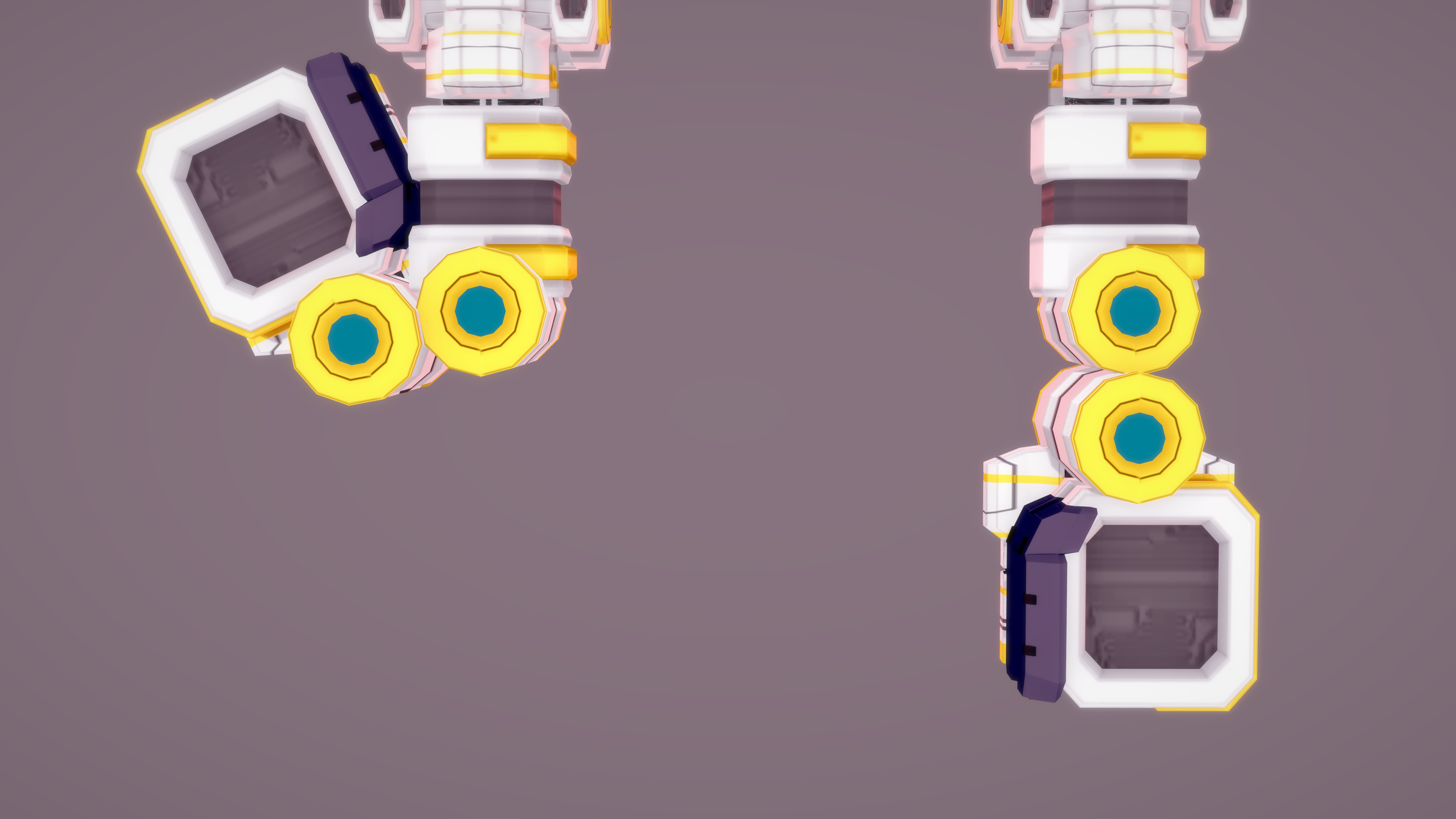
恐らくロボットものでは最もポピュラーな関節。ガンプラ等を作っている方には馴染みが深いことでしょう。
永野護が発明した、2つの可動軸を重ねることで可動域を拡大する方式の関節です。
メリットは可動域の広さ。関節が2つあれば可動域も2倍になります。
パーツと可動軸の配置を上手く工夫すれば、上腕と二の腕を干渉させずに肘を180度曲げてしまうことすら可能になります。
ここで紹介する3つの方式のうち、単純な可動域なら最高と言えるでしょう。
デメリットは、可動軸を2つ配置する都合上、サイズが大きくなりやすいこと。
上手く調整しないと肘や膝の関節がやたらと目立ってしまい、見栄えが悪くなります。
また、関節が増えるということはフォルダの数も増えることを意味します。要は部位1つを調整するために2つの関節をいちいち調整せねばならず、単軸関節と比べて動かすのが面倒くさいのです。
●大型単軸関節
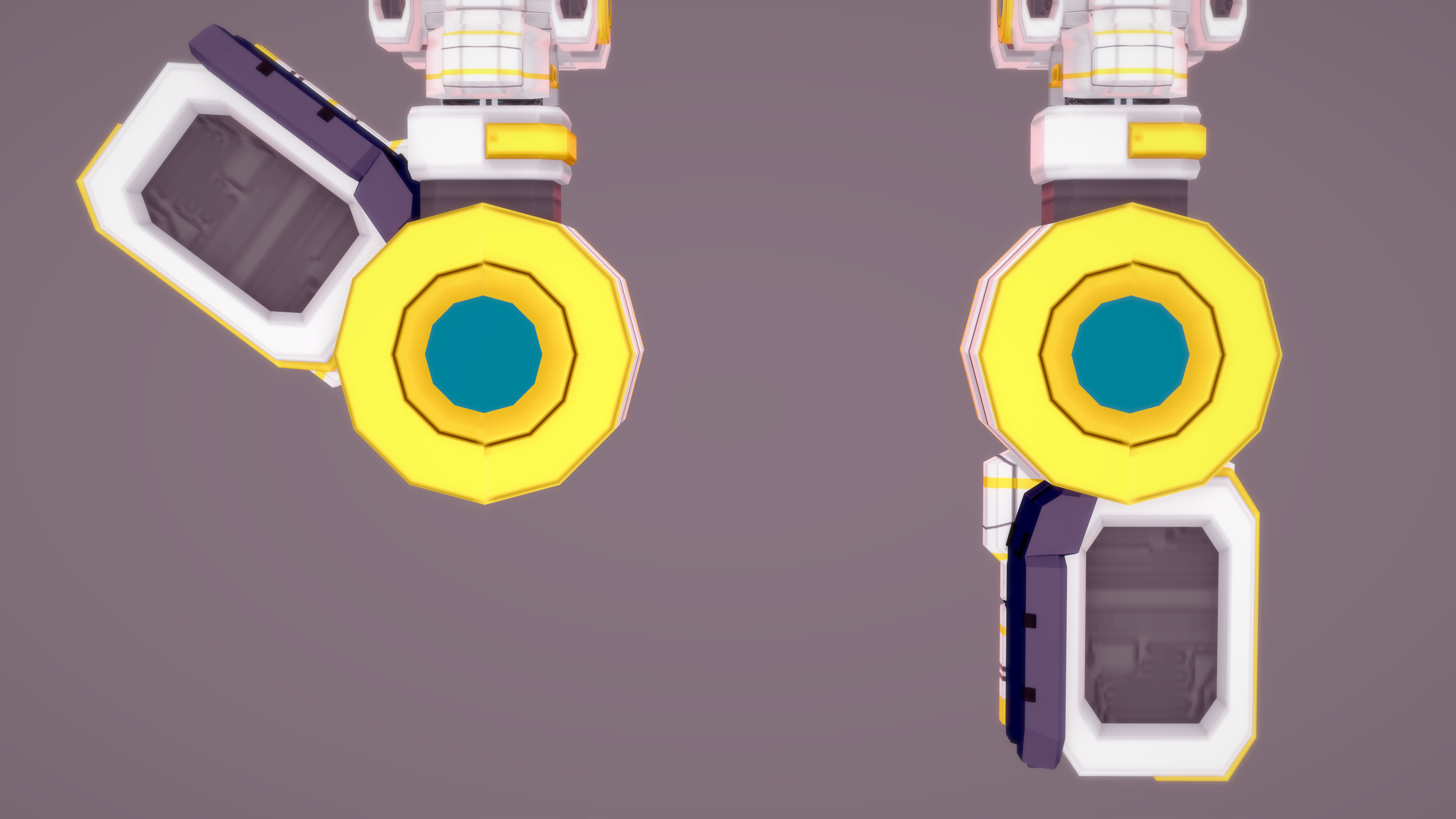
通常の単軸関節の構造はそのままに可動軸を大型化し、肘を曲げる際のストロークを大きくすることで可動域を拡大する、至ってシンプルな方式です。
メリットは本当に「構造はそのまま、可動域を大きくしただけ」なので、作る作業が楽なことです。
また、前だけでなく後ろにも大きく動かすことが出来るため、変形ロボのジョイントや、背中から伸びるサブアームなど、前後に大きく動かす必要のある部位に非常に向いているのもメリットと言えます。
デメリットとしては、可動域を広げれば広げるほど可動軸が肥大化してしまうため、関節が大きく目立ち、上腕と二の腕の長さにも影響してしまうこと。二重関節にもある欠点ですが、こちらは「工夫しないと大きくなりがち」ではなく「必然的に大きくならざるを得ない」ため、見栄えと可動域のバランスを上手く見極める必要があります。
また、これは個人の好みかもしれませんが、可動軸が大きくなれば肘の裏側にも可動レールが伸びる形になります。
人間の肘が裏側に曲がるようには出来ておらず、よって普通のポージングではまず使わない部分なので、ここに大きなレールが張り出していると、なんだか無駄の多い見た目になってしまいます。
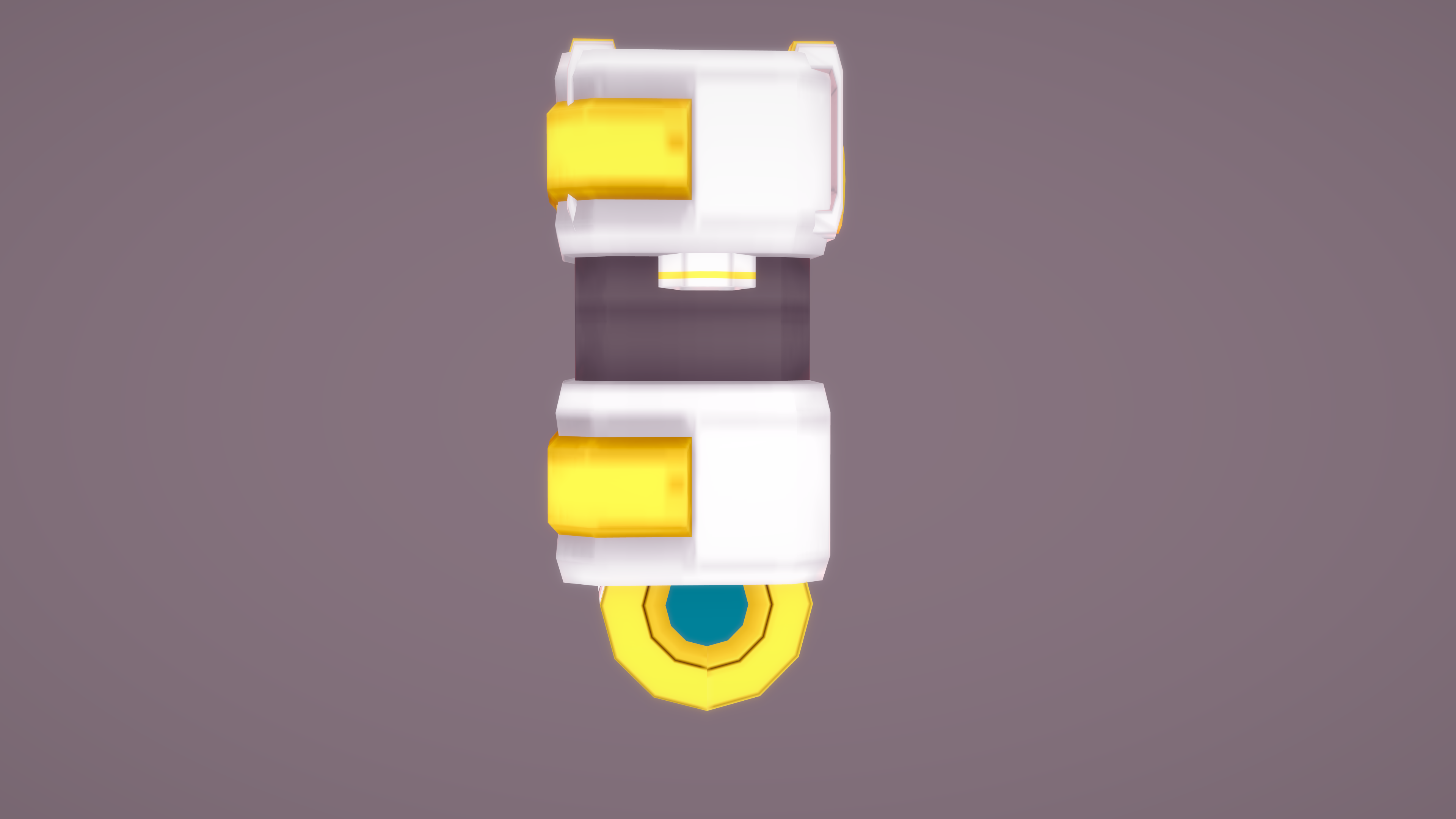
●オフセット式単軸関節
こちらは単軸のまま、可動域を腕や脚の正中線からずらして配置する方式です。
「180度曲げると上腕と二の腕が完全に重なってしまう」のであれば、「180度曲げてもなるべく重ならないように配置すればいい」という発想ですね。
肘は前方、膝は後方寄りに配置する形になります。
メリットは可動軸のサイズが小さくてもいいので、見た目がすっきりすること。
通常の単軸関節のシンプルさはそのまま、二重関節並みとまではいかずとも大きく曲げることが出来ます。
デメリットとして挙げられるのは、作るのに手間がかかること。
先述した2つの方式ならば上下方向の位置だけ考えればいいのですが、正中線からずらして配置する都合上、上下に加えて前後方向の配置も細かく調整しないといけません。
ただずらしたら可動域が拡大する、という単純なものではなく、大きく動かせて見た目もコンパクトに纏められる軸配置を見極める必要があります。
■結局どの方式がいいの?
一長一短です。
どの方式にもメリットとデメリットがあり、一概にどれが優れているとは言えません。
私は肘と膝には基本的にオフセット式単軸関節を使いますが、これはあくまで私が一番使いやすいと思ったから。
自分のスタイルに合った、動かしやすいと思う関節構造を選びましょう。
◆最後に
さて、いかがだったでしょうか。
ロボの関節というものは非常に奥が深く、そこには熱く語れる魅力があります。
可動範囲と見た目の美しさのバランスをどう取るのか。作り手の個性はそこに非常に大きく表れるでしょう。
前書きで「よく動けばSS映えするロボが作れる」と書きましたが、様々なポージングが出来るロボは動かしているだけでも楽しいものです。
せっかくSSを撮るなら、作業も楽しくしてみませんか?
恐らく、ここで紹介した以外にも、よく動く関節の作り方はいくつもあるでしょう。それを探求するのも楽しいかもしれませんね。
次回はメカパーツの活用法についての記事にしたいと思います。
それでは。
◆おまけ
ここまで散々偉そうな口を叩いておいてなんですが、実は今回紹介した関節作りのテクニックは、R-AREAさんの同人誌「航宙ファン5(ストライクガンダム)」から非常に強い影響を受けたものです。
自分だけで編み出したみたいに書くのは気が引けるので、商品ページのリンクを載せておきます(管理人のあんせさんから許可は頂いています)。
念のために補足しておきますが、私はその同人誌の制作、販売には一切関与しておらず、仮に下記のリンクから購入された方がいたとしても私には何の収益もありません。
あくまで、参考にした方に対するリスペクトとしてのものです。
関節構造以外にも、ロボット好きなら一読の価値があるような考察が多数盛り込まれていますので、是非手に取っていただきたいです。
